
Acht Servos an einem LocoNet-Modul
Die Firmware gründet auf der Entwicklung von Dani Guisado - www.clubncaldes.com.
Innerhalb Rocrail bildet sie die Funktionalität des LocoNet-Bausteiens CGA136 ab.
Da dieser Baustein fast uneingeschränkt zum Stellen unserer Weichen dient, werden die Servos nach erreichen ihrer jeweiligen Endposition abgeschaltet. Damit wird einerseits die termische Leistung des 7805 enorm reduziert und andererseits die Mechanik des Servos entlastet.
Die Firmware ist mit der Vers-Nr.: 102 versehen.
Servo unter Racrail einrichten:
Voraussetzung ist, dass eine funktionierende Verbindung über eine LocoNetkompatible Zentrale besteht.
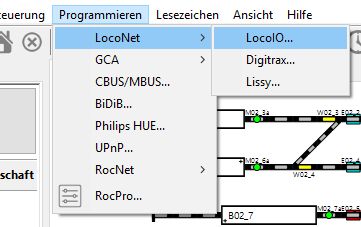
Über den Menüpunkt Programmieren -> LocoNet -> LocoIO wird der eigentliche Programmierdialog geöffnet.
Dieser mehrseitige Dialog ist sehr mächtig. Seine sieben Reiter gruppieren zusammengehörige Konfigurationsgruppen.
Beim Aufruf des Dialoges befindet man sich in der Konfigurationsgruppe "Adresses".
Nach einem Mausklick auf Query werden alle LocoNet-Module, welche an diesem Bus hängen und die Abfrage erkennen, mit ihrer Moduladresse und Firmwareversion aufgelistet.
Die Versionsnummern lassen auf die Verwendung des Moduls schließen.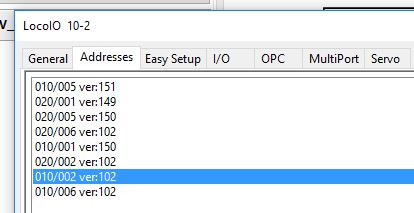
Aktuell gilt:
| V-Nr.: | Verwendung | Info |
| 101 | Servo | |
| 102 | EBF-Servo | Arduino |
| 149 | IO | |
| 150 | EBF-IO | Arduino |
| 151 | EBF-IO | Arduino |
| 841 | EBF-MP3-Sound | Arduino |
Nachdem das Servomodul markiert ist kann im Konfigurationsbereich "Easy Setup" mit Get All die Konfiguration der Ports ausgelesen werden.
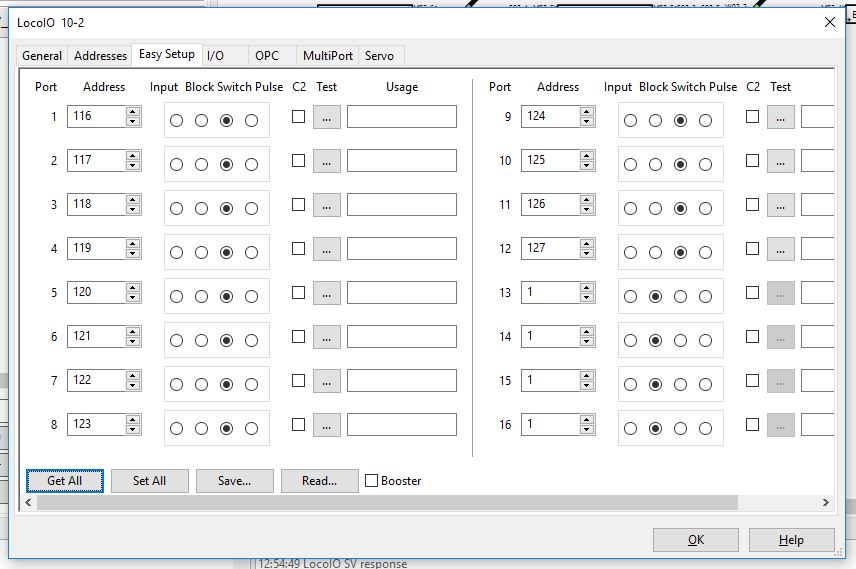 In der Titelzeile des Dialogs wird die aktuelle Moduladresse angezeigt.
In der Titelzeile des Dialogs wird die aktuelle Moduladresse angezeigt.
Um unser Modul als Achtfach-Servo einsetzen zu können müssen die ersten acht Ports als Switch eingestellt werden. Natürlich sollte jeder Port seine eigene Adresse besitzen, sonst kann es zu unerwünschten Adresskonflikten führen.
Sind die Einstellungen alle vorgenommen wird mit Set All die neue Kofiguration in das EPROM des Moduls geschrieben. Zusätzlich sollte die Konfiguration nochmals lokal mit Save gespeichert werden.
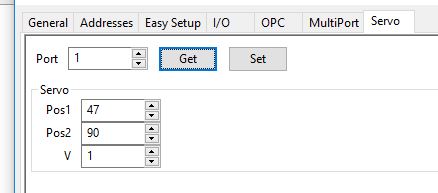
Nun wird jeder einzelner Servoport eingestellt:
Port auswählen und mit Get die aktuellen Positionen aus dem EPROM des Moduls lesen.
Start- und Endposition werden in den Feldern Pos1 und Pos2 definiert. Der Parameter V steht für die Geschwindigkeit. Hier werden Werte von 0 bis 5 ausgewertet.
Nach einem klick auf Set werden die Daten ins EProm geschrieben. Ber unserer Firmwareversion 102 bewegt sich dann das Ruderhorn mit der vorgegebenen Geschwindikeit von der Start- zur Endposition und wieder zurück.
Nach dem Programmieren sollten die Module kurz ausgeschaltet werden, damit sie komplett neu hochfahren. Danach sind sie einsatzbereit.
Quelle: https://wiki.rocrail.net/doku.php?id=lnsv-de
Arduino-Sketch
/**************************************************************************
LocoIno - Configurable Arduino Loconet Module
Copyright (C) 2014 Daniel Guisado Serra
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
------------------------------------------------------------------------
AUTHOR : Dani Guisado - http://www.clubncaldes.com
------------------------------------------------------------------------
DESCRIPTION:
This software emulates the functionality of a GCA50 board from Peter
Giling (Giling Computer Applications) attached to two GCA136 to manage
servos.
Configuration is done through SV Loconet protocol and can be configured
from Rocrail (Programming->GCA->GCA50).
------------------------------------------------------------------------
PIN ASSIGNMENT:
0,1 -> Serial, used to debug and Loconet Monitor (uncomment DEBUG)
2,3,4,5,6,9,10,11 -> Attach one servo motor to each pin
7 -> Loconet TX (connected to GCA185 shield)
8 -> Loconet RX (connected to GCA185 shield)
Configure in Rocrail first 8 ports as output, and last 8 as input
to be used as retro signaling for the switch position
------------------------------------------------------------------------
CREDITS:
* Based on MRRwA Loconet libraries for Arduino - http://mrrwa.org/ and
the Loconet Monitor example.
* Inspired in GCA50 board from Peter Giling - http://www.phgiling.net/
* Idea also inspired in LocoShield from SPCoast - http://www.scuba.net/
* Thanks also to Rocrail group - http://www.rocrail.net
*************************************************************************/
#include
#include
#include
//Uncomment this line to debug through the serial monitor
//#define DEBUG
#define VERSION 102
#define SVTABLE_MAX_RECORD 125
#define SERVO_LAPSE 10 //millis between servo movements
ServoTimer2 servo[8];
//3 bytes defining a pin behavior ( http://wiki.rocrail.net/doku.php?id=loconet-io-en )
typedef struct
{
uint8_t cnfg;
uint8_t value1;
uint8_t value2;
} PIN_CFG;
//Memory map exchanged with SV read and write commands ( http://wiki.rocrail.net/doku.php?id=lnsv-en )
typedef struct
{
uint8_t vrsion;
uint8_t addr_low;
uint8_t addr_high;
PIN_CFG pincfg[SVTABLE_MAX_RECORD-3];
} SV_TABLE;
//Union to access the data with the struct or by index
typedef union {
SV_TABLE svt;
uint8_t data[SVTABLE_MAX_RECORD];
} SV_DATA;
SV_DATA svtable;
lnMsg *LnPacket;
//This table contains the addresses already transformed in a decimal value
uint16_t directions[16];
int servoCurrentPos[8]; //current position of each servo
int servopin[8] = {2,3,4,5,6,9,10,11};
void setup()
{
int n;
// First initialize the LocoNet interface
LocoNet.init(7);
// Configure the serial port for 57600 baud
#ifdef DEBUG
Serial.begin(57600);
Serial.print("LocoNet Monitor v.");Serial.println(VERSION);
#endif
//Load config from EEPROM
for (n=0;n<svtable_max_record;n++)
svtable.data[n]=EEPROM.read(n);
//Load right addresses moving the right bits
for (n=0;n<16;n++)
{
//TODO set right addresses for inputs
directions[n]=svtable.svt.pincfg[n].value1;
bitWrite(directions[n],7,bitRead(svtable.svt.pincfg[n].value2,0));
bitWrite(directions[n],8,bitRead(svtable.svt.pincfg[n].value2,1));
bitWrite(directions[n],9,bitRead(svtable.svt.pincfg[n].value2,2));
}
//Attacch Servos
/*
servo[0].attach(2);
servo[1].attach(3);
servo[2].attach(4);
servo[3].attach(5);
servo[4].attach(6);
servo[5].attach(9);
servo[6].attach(10);
servo[7].attach(11);
*/
// Ä Oestreicher Servopins aus einem Array zuweisen, damit sie abgeschaltet werden können, wenn die Endpositionen erreicht sind
servo[0].attach(servopin[0]);
servo[1].attach(servopin[1]);
servo[2].attach(servopin[2]);
servo[3].attach(servopin[3]);
servo[4].attach(servopin[4]);
servo[5].attach(servopin[5]);
servo[6].attach(servopin[6]);
servo[7].attach(servopin[7]);
pinMode(13, OUTPUT);
//Check for a valid config
if (svtable.svt.vrsion!=VERSION)
{
svtable.svt.vrsion=VERSION;
svtable.svt.addr_low=81;
svtable.svt.addr_high=1;
EEPROM.write(0,VERSION);
EEPROM.write(1, svtable.svt.addr_low);
EEPROM.write(2, svtable.svt.addr_high);
//Center servos if no previous configuration
for (n=0;n<8;n++)
{
servoCurrentPos[n]=63;
positionServo(n,63);
}
}
else
{
//Position servos and set retro signals
for (n=0;n<8;n++)
{
servoCurrentPos[n]=svtable.data[101+n*3];
positionServo(n,servoCurrentPos[n]);
bitWrite(svtable.svt.pincfg[n+8].value2,4,0);
LocoNet.send(OPC_INPUT_REP, svtable.svt.pincfg[n+8].value1, svtable.svt.pincfg[n+8].value2);
}
}
}
void loop()
{
// Check for any received LocoNet packets
LnPacket = LocoNet.receive() ;
if( LnPacket )
{
#ifdef DEBUG
// First print out the packet in HEX
Serial.print("RX: ");
uint8_t msgLen = getLnMsgSize(LnPacket);
for (uint8_t x = 0; x < msgLen; x++)
{
uint8_t val = LnPacket->data[x];
// Print a leading 0 if less than 16 to make 2 HEX digits
if(val < 16)
Serial.print('0');
Serial.print(val, HEX);
Serial.print(' ');
}
Serial.println();
#endif
// If this packet was not a Switch or Sensor Message checks por PEER packet
if (!LocoNet.processSwitchSensorMessage(LnPacket))
processPeerPacket();
}
}
/*************************************************************************/
/* SERVO FUNCTIONS */
/*************************************************************************/
// moves a servo transforming the angle 0-127 to pulses value range needed by the library
void positionServo(int pServoNum, int pPosition)
{
int val=0;
int lncvnum;
val=map(pPosition,1, 127, MIN_PULSE_WIDTH, MAX_PULSE_WIDTH);
servo[pServoNum].write(val);
}
// moves a servo according to the servoDestPos[#servo]
// and the configured speed
void moveServo(int pNumServo, int pDestPos)
{
int grades;
int steps;
//if servo already in desired position exit
if (pDestPos==servoCurrentPos[pNumServo]) return;
servo[pNumServo].attach(servopin[pNumServo]); // Ä Oestreicher Servopin verbinden, Servo kann bewegt werden
digitalWrite(13, HIGH);
//read configuration servo speed 0 - 5
steps=5-svtable.data[103+pNumServo*3];
if (servoCurrentPos[pNumServo]<pdestpos)
{
// increment grades
for (grades=servoCurrentPos[pNumServo];grades<=pDestPos;grades++)
{
positionServo(pNumServo,grades);
delay(SERVO_LAPSE*steps);
}
bitWrite(svtable.svt.pincfg[pNumServo+8].value2,4,1);
LocoNet.send(OPC_INPUT_REP, svtable.svt.pincfg[pNumServo+8].value1, svtable.svt.pincfg[pNumServo+8].value2);
}
else
{
// decrement grades
for (grades=servoCurrentPos[pNumServo];grades>=pDestPos;grades--)
{
positionServo(pNumServo,grades);
delay(SERVO_LAPSE*steps);
}
bitWrite(svtable.svt.pincfg[pNumServo+8].value2,4,0);
LocoNet.send(OPC_INPUT_REP, svtable.svt.pincfg[pNumServo+8].value1, svtable.svt.pincfg[pNumServo+8].value2);
}
servoCurrentPos[pNumServo]=pDestPos;
servo[pNumServo].detach(); // Ä Oestreicher Servopin entfernen, Servo ruht
digitalWrite(13, LOW);
}
/*************************************************************************/
/* LOCONET FUNCTIONS */
/*************************************************************************/
void notifyPower( uint8_t State )
{
int n;
#ifdef DEBUG
Serial.print("POWER: ");
Serial.println( State ? "ON" : "OFF" );
#endif
if (State)
{
for (n=0;n<8;n++)
LocoNet.send(OPC_INPUT_REP, svtable.svt.pincfg[n+8].value1, svtable.svt.pincfg[n+8].value2);
}
}
// This call-back function is called from LocoNet.processSwitchSensorMessage
// for all Sensor messages
void notifySensor( uint16_t Address, uint8_t State )
{
#ifdef DEBUG
Serial.print("Sensor: ");
Serial.print(Address, DEC);
Serial.print(" - ");
Serial.println( State ? "Active" : "Inactive" );
#endif
}
// This call-back function is called from LocoNet.processSwitchSensorMessage
// for all Switch Request messages
void notifySwitchRequest( uint16_t Address, uint8_t Output, uint8_t Direction )
{
int n;
//Direction must be changed to 0 or 1, not 0 or 32
Direction ? Direction=1 : Direction=0;
#ifdef DEBUG
Serial.print("Switch Request: ");
Serial.print(Address, DEC);
Serial.print(':');
Serial.print(Direction ? "Closed" : "Thrown");
Serial.print(" - ");
Serial.println(Output ? "On" : "Off");
#endif
//Check if the Address is assigned, configured as output and same Direction
for (n=0; n<8; n++)
{
//if ((svtable.svt.pincfg[n].value1 == Address-1) && //Address
if ((directions[n] == Address-1) &&
(bitRead(svtable.svt.pincfg[n].cnfg,7) == 1)) //Setup as an Output
{
//If continue and software reset, one Direction ON turns on and other Direction ON turns off
//OFF messages are not listened
if (bitRead(svtable.svt.pincfg[n].cnfg,3)==0 && bitRead(svtable.svt.pincfg[n].cnfg,2)==0 && Output)
{
if (!Direction)
{
//Servo to one side
moveServo(n,svtable.data[101+3*n]);
}
else
{
//Servo to the other side
moveServo(n,svtable.data[102+3*n]);
}
break;
}
}
}
}
// This call-back function is called from LocoNet.processSwitchSensorMessage
// for all Switch Report messages
void notifySwitchReport( uint16_t Address, uint8_t Output, uint8_t Direction )
{
#ifdef DEBUG
Serial.print("Switch Report: ");
Serial.print(Address, DEC);
Serial.print(':');
Serial.print(Direction ? "Closed" : "Thrown");
Serial.print(" - ");
Serial.println(Output ? "On" : "Off");
#endif
}
// This call-back function is called from LocoNet.processSwitchSensorMessage
// for all Switch State messages
void notifySwitchState( uint16_t Address, uint8_t Output, uint8_t Direction )
{
#ifdef DEBUG
Serial.print("Switch State: ");
Serial.print(Address, DEC);
Serial.print(':');
Serial.print(Direction ? "Closed" : "Thrown");
Serial.print(" - ");
Serial.println(Output ? "On" : "Off");
#endif
}
/*************************************************************************/
/* SV TABLE FUNCTIONS */
/*************************************************************************/
boolean processPeerPacket()
{
//Check is a OPC_PEER_XFER message
if (LnPacket->px.command != OPC_PEER_XFER) return(false);
#ifdef DEBUG
Serial.println("<< OPC_PEER_XFER received...");
#endif
//Check is my destination
if ((LnPacket->px.dst_l!=0 || LnPacket->px.d5!=0) &&
(LnPacket->px.dst_l!=0x7f || LnPacket->px.d5!=svtable.svt.addr_high) &&
(LnPacket->px.dst_l!=svtable.svt.addr_low || LnPacket->px.d5!=svtable.svt.addr_high))
{
#ifdef DEBUG
Serial.println("OPC_PEER_XFER not for me!");
Serial.print("LnPacket->px.dst_l: ");Serial.print(LnPacket->px.dst_l);Serial.print(" Addr low: ");Serial.println(svtable.svt.addr_low);
Serial.print("LnPacket->px.d5: ");Serial.print(LnPacket->px.d5);Serial.print(" Addr high: ");Serial.println(svtable.svt.addr_high);
Serial.print("LnPacket->px.dst_h: ");Serial.print(LnPacket->px.dst_h);Serial.print(" Addr high: ");Serial.println(svtable.svt.addr_high);
Serial.print("LnPacket->px.d1: ");Serial.println(LnPacket->px.d1);
Serial.print("LnPacket->px.d2: ");Serial.println(LnPacket->px.d2);
#endif
return(false);
}
//Set high bits in right position
bitWrite(LnPacket->px.d1,7,bitRead(LnPacket->px.pxct1,0));
bitWrite(LnPacket->px.d2,7,bitRead(LnPacket->px.pxct1,1));
bitWrite(LnPacket->px.d3,7,bitRead(LnPacket->px.pxct1,2));
bitWrite(LnPacket->px.d4,7,bitRead(LnPacket->px.pxct1,3));
bitWrite(LnPacket->px.d5,7,bitRead(LnPacket->px.pxct2,0));
bitWrite(LnPacket->px.d6,7,bitRead(LnPacket->px.pxct2,1));
bitWrite(LnPacket->px.d7,7,bitRead(LnPacket->px.pxct2,2));
bitWrite(LnPacket->px.d8,7,bitRead(LnPacket->px.pxct2,3));
//OPC_PEER_XFER D1 -> Command (1 SV write, 2 SV read)
//OPC_PEER_XFER D2 -> Register to read or write
if (LnPacket->px.d1==2)
{
#ifdef DEBUG
Serial.print("READ ");Serial.print(LnPacket->px.d2);Serial.print(" ");Serial.print(LnPacket->px.d2+1);Serial.print(" ");Serial.println(LnPacket->px.d2+2);
#endif
delay(50);
sendPeerPacket(svtable.data[LnPacket->px.d2], svtable.data[LnPacket->px.d2+1], svtable.data[LnPacket->px.d2+2]);
#ifdef DEBUG
Serial.println(">> OPC_PEER_XFER answer sent");
Serial.println("=============================================");
#endif
return (true);
}
//Write command
if (LnPacket->px.d1==1)
{
//SV 0 contains the program version (write SV0 == RESET? )
if (LnPacket->px.d2>0)
{
//Store data
svtable.data[LnPacket->px.d2]=LnPacket->px.d4;
EEPROM.write(LnPacket->px.d2,LnPacket->px.d4);
//set servo position if servo config command
if (LnPacket->px.d2==103)
{
moveServo(0,svtable.data[101]);
delay(1000);
moveServo(0,svtable.data[102]);
}
if (LnPacket->px.d2==106)
{
moveServo(1,svtable.data[104]);
delay(1000);
moveServo(1,svtable.data[105]);
}
if (LnPacket->px.d2==109)
{
moveServo(2,svtable.data[107]);
delay(1000);
moveServo(2,svtable.data[108]);
}
if (LnPacket->px.d2==112)
{
moveServo(3,svtable.data[110]);
delay(1000);
moveServo(3,svtable.data[111]);
}
if (LnPacket->px.d2==115)
{
moveServo(4,svtable.data[113]);
delay(1000);
moveServo(4,svtable.data[114]);
}
if (LnPacket->px.d2==118)
{
moveServo(5,svtable.data[116]);
delay(1000);
moveServo(5,svtable.data[117]);
}
if (LnPacket->px.d2==121)
{
moveServo(6,svtable.data[119]);
delay(1000);
moveServo(6,svtable.data[120]);
}
if (LnPacket->px.d2==124)
{
moveServo(7,svtable.data[122]);
delay(1000);
moveServo(7,svtable.data[123]);
}
#ifdef DEBUG
Serial.print("ESCRITURA "); Serial.print(LnPacket->px.d2); Serial.print(" <== ");
Serial.print(LnPacket->px.d4); Serial.print(" | ");
Serial.print(LnPacket->px.d4, HEX); Serial.print(" | ");
Serial.println(LnPacket->px.d4, BIN);
#endif
}
//Answer packet
delay(50);
sendPeerPacket(0x00, 0x00, LnPacket->px.d4);
#ifdef DEBUG
Serial.println(">> OPC_PEER_XFER answer sent");
Serial.println("=============================================");
#endif
return (true);
}
return (false);
}
void sendPeerPacket(uint8_t p0, uint8_t p1, uint8_t p2)
{
lnMsg txPacket;
txPacket.px.command=OPC_PEER_XFER;
txPacket.px.mesg_size=0x10;
txPacket.px.src=svtable.svt.addr_low;
txPacket.px.dst_l=LnPacket->px.src;
txPacket.px.dst_h=LnPacket->px.dst_h;
txPacket.px.pxct1=0x00;
txPacket.px.d1=LnPacket->px.d1; //Original command
txPacket.px.d2=LnPacket->px.d2; //SV requested
txPacket.px.d3=svtable.svt.vrsion;
txPacket.px.d4=0x00;
txPacket.px.pxct2=0x00;
txPacket.px.d5=svtable.svt.addr_high; //SOURCE high address
txPacket.px.d6=p0;
txPacket.px.d7=p1;
txPacket.px.d8=p2;
//Set high bits in right position
bitWrite(txPacket.px.pxct1,0,bitRead(txPacket.px.d1,7));
bitClear(txPacket.px.d1,7);
bitWrite(txPacket.px.pxct1,1,bitRead(txPacket.px.d2,7));
bitClear(txPacket.px.d2,7);
bitWrite(txPacket.px.pxct1,2,bitRead(txPacket.px.d3,7));
bitClear(txPacket.px.d3,7);
bitWrite(txPacket.px.pxct1,3,bitRead(txPacket.px.d4,7));
bitClear(txPacket.px.d4,7);
bitWrite(txPacket.px.pxct2,0,bitRead(txPacket.px.d5,7));
bitClear(txPacket.px.d5,7);
bitWrite(txPacket.px.pxct2,1,bitRead(txPacket.px.d6,7));
bitClear(txPacket.px.d6,7);
bitWrite(txPacket.px.pxct2,2,bitRead(txPacket.px.d7,7));
bitClear(txPacket.px.d7,7);
bitWrite(txPacket.px.pxct2,3,bitRead(txPacket.px.d8,7));
bitClear(txPacket.px.d8,7);
LocoNet.send(&txPacket);
#ifdef DEBUG
Serial.println("OPC_PEER_XFER Packet sent!");
#endif
}